Summary
While the operator was in plan mode, the agent never called submit_plan, never showed the plan-review UI (Y approve · N reject · or type feedback to refine), and never asked for approval. It just ran a long sequence of read-only recon actions until the operator hit Ctrl-C.
Plan mode's product contract is "agent proposes, operator approves, then we execute." Right now there's no forcing function — the agent can recon indefinitely and never produce a plan, and the operator never gets a chance to approve anything before the agent starts acting.
Screenshot
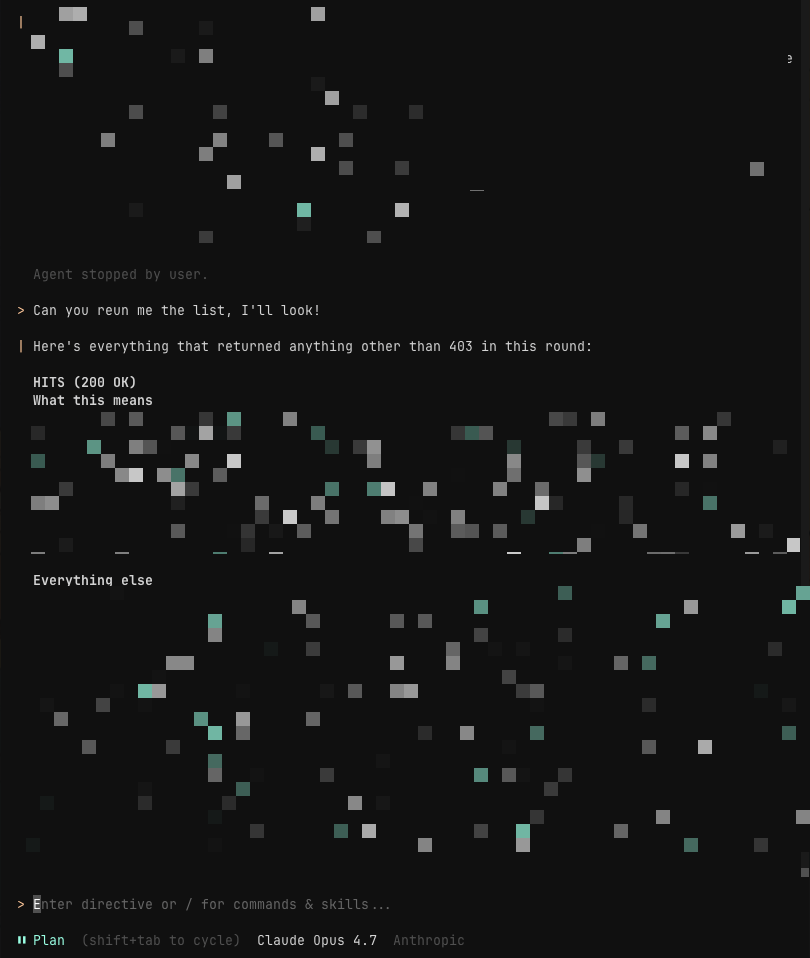
Status bar reads Plan (shift+tab to cycle). Agent had been listing HITS (200 OK) / everything else with no plan submission. Operator interrupted manually.
Reproduction
/operator, then Shift+Tab to cycle into Plan mode.- Issue any recon-flavored directive ("crawl this target", "enumerate endpoints", etc.).
- Watch the agent rack up
http_request / crawl calls without ever calling submit_plan. The review modal never appears.
- The only escape is Ctrl-C. Shift+Tab cycling out only opens the review modal if a plan file already exists on disk — otherwise it silently drops into
manual with no approval gate.
Expected behavior
Plan mode should be a gated two-phase flow:
- Propose — agent reconnaissances and writes a plan via
write_plan.
- Approve — agent calls
submit_plan, the run halts, the review modal appears. Operator presses Y, N, or types feedback. Only Y transitions the operator into an execution mode (manual / auto) with the approved plan injected into the system prompt.
Concretely, that means:
- A successful
submit_plan is a hard stop. The agent must not call any further tools until the operator decides.
- The transition
plan → manual|auto happens only as a result of an operator approval, not as a silent fallback from cycling.
- Plan mode should converge. If the agent goes too many steps without submitting, surface a system message and halt the run instead of letting recon drift forever.
Desired state (what "fixed" looks like)
- Every transition out of
plan into an execution mode is immediately preceded by an operator approval event.
- After a successful
submit_plan, the next event is the review modal — no further tool calls in between.
- Plan mode runs always reach a terminal state: approved, rejected (back to refine), or halted with a "no plan submitted" message. Never "drifted indefinitely."
- The plan content the operator approves is the plan content that ends up in the system prompt (no drift between read-time and approve-time).
Invariants worth enforcing
plan → manual|auto only happens via an operator approval tied to a specific plan snapshot.submit_plan only returns success when a non-empty plan exists on disk for the active scope. (Already true; worth a regression test.)- A successful
submit_plan halts the current agent step before any further tool call. (The swarm path already does this at src/core/workflows/pentest.ts:262 with stopWhen: hasToolCall("submit_plan") — the operator dashboard run path doesn't.)
- While
agentMode === "plan", the active tool list is strictly PLAN_MODE_TOOL_NAMES. (Already enforced at src/core/agents/offSecAgent/offensiveSecurityAgent.ts:319-324 — worth a unit test so it can't regress.)
Pointers for whoever picks this up
These are starting points, not a prescription — pick the shape that fits.
- The minimal fix is one line: add
hasToolCall("submit_plan") to commonInput.stopWhen in src/tui/components/operator-dashboard/index.tsx when agentMode === "plan". That alone closes the "agent keeps going after submit_plan" half of the bug and aligns the operator path with the swarm path.
- The other half — "agent never submits and the cycle silently drops to
manual" — likely wants either a recon budget that surfaces a "no plan submitted" halt, or tightening cycleMode so cycling out of plan without a plan file is a louder failure than today.
- Plan lifecycle state is currently spread across several refs in
operator-dashboard/index.tsx (planSubmittedRef, planRejectedRef, planApprovedPendingRunRef, planGateBypassedOnResumeRef, approvedPlanRef, plus operatorMode and showPlanReview). If you're already in there, collapsing them into one source of truth would make the invariants above easier to enforce — but that's a judgment call, not a requirement for this fix.
Tests in src/tui/components/operator-dashboard/logic.test.ts already cover the cycle / approval logic — extending that file is the natural place for regression coverage.
Summary
While the operator was in
planmode, the agent never calledsubmit_plan, never showed the plan-review UI (Y approve · N reject · or type feedback to refine), and never asked for approval. It just ran a long sequence of read-only recon actions until the operator hit Ctrl-C.Plan mode's product contract is "agent proposes, operator approves, then we execute." Right now there's no forcing function — the agent can recon indefinitely and never produce a plan, and the operator never gets a chance to approve anything before the agent starts acting.
Screenshot
Status bar reads
Plan (shift+tab to cycle). Agent had been listing HITS (200 OK) / everything else with no plan submission. Operator interrupted manually.Reproduction
/operator, then Shift+Tab to cycle intoPlanmode.http_request/ crawl calls without ever callingsubmit_plan. The review modal never appears.manualwith no approval gate.Expected behavior
Plan mode should be a gated two-phase flow:
write_plan.submit_plan, the run halts, the review modal appears. Operator pressesY,N, or types feedback. OnlyYtransitions the operator into an execution mode (manual/auto) with the approved plan injected into the system prompt.Concretely, that means:
submit_planis a hard stop. The agent must not call any further tools until the operator decides.plan → manual|autohappens only as a result of an operator approval, not as a silent fallback from cycling.Desired state (what "fixed" looks like)
planinto an execution mode is immediately preceded by an operator approval event.submit_plan, the next event is the review modal — no further tool calls in between.Invariants worth enforcing
plan → manual|autoonly happens via an operator approval tied to a specific plan snapshot.submit_planonly returns success when a non-empty plan exists on disk for the active scope. (Already true; worth a regression test.)submit_planhalts the current agent step before any further tool call. (The swarm path already does this atsrc/core/workflows/pentest.ts:262withstopWhen: hasToolCall("submit_plan")— the operator dashboard run path doesn't.)agentMode === "plan", the active tool list is strictlyPLAN_MODE_TOOL_NAMES. (Already enforced atsrc/core/agents/offSecAgent/offensiveSecurityAgent.ts:319-324— worth a unit test so it can't regress.)Pointers for whoever picks this up
These are starting points, not a prescription — pick the shape that fits.
hasToolCall("submit_plan")tocommonInput.stopWheninsrc/tui/components/operator-dashboard/index.tsxwhenagentMode === "plan". That alone closes the "agent keeps going after submit_plan" half of the bug and aligns the operator path with the swarm path.manual" — likely wants either a recon budget that surfaces a "no plan submitted" halt, or tighteningcycleModeso cycling out ofplanwithout a plan file is a louder failure than today.operator-dashboard/index.tsx(planSubmittedRef,planRejectedRef,planApprovedPendingRunRef,planGateBypassedOnResumeRef,approvedPlanRef, plusoperatorModeandshowPlanReview). If you're already in there, collapsing them into one source of truth would make the invariants above easier to enforce — but that's a judgment call, not a requirement for this fix.Tests in
src/tui/components/operator-dashboard/logic.test.tsalready cover the cycle / approval logic — extending that file is the natural place for regression coverage.