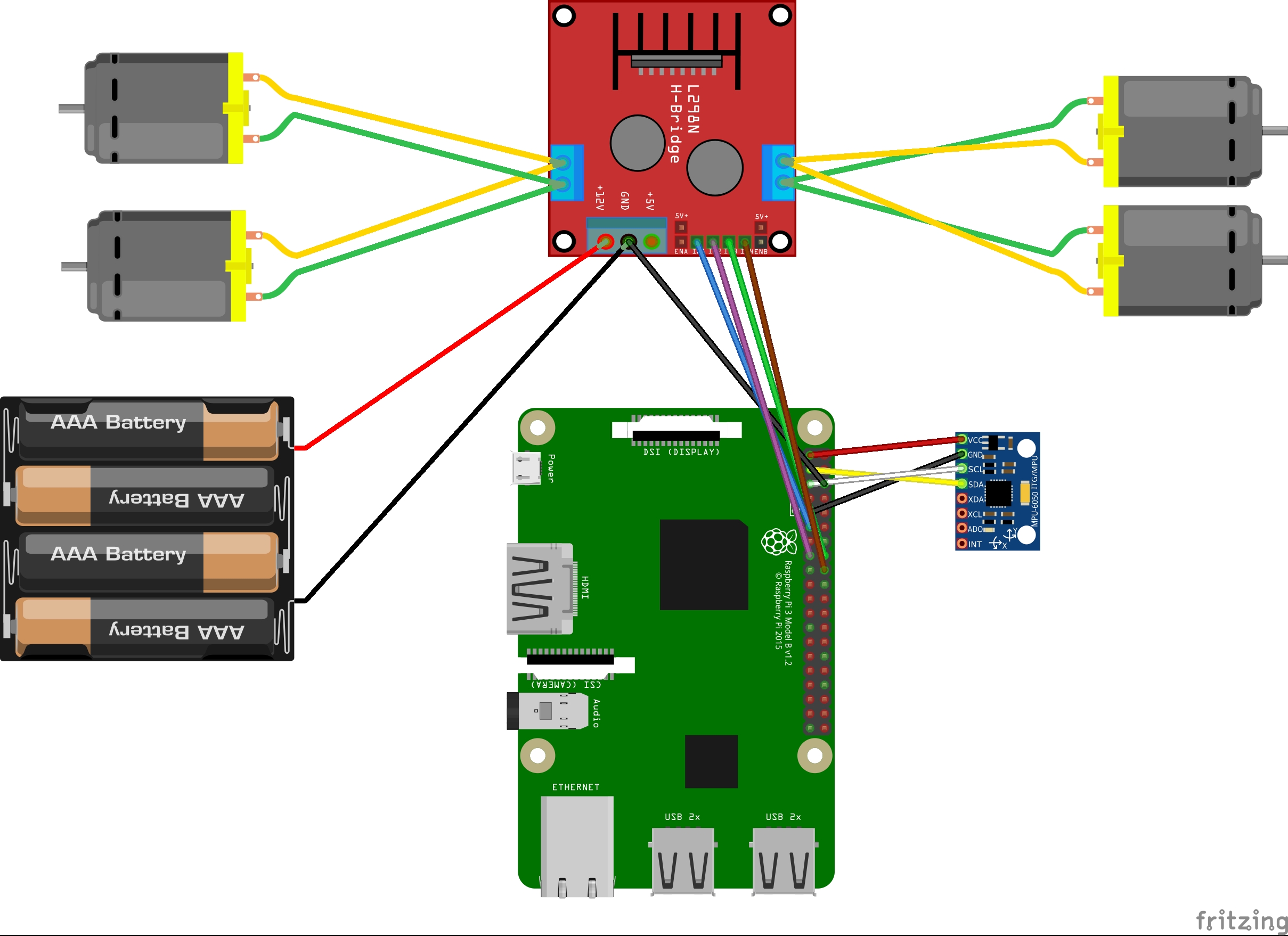
elanus is a wifi fpv car powered by Raspberry Pi 🍓
{kind=link}
The gyro sensor can be ignored for the moment
git clone https://github.com/xrv0/elanus.git
cd elanus
pip3 install -r requirements.txtsudo raspi-config
# Then go into Interface Options -> Camera and enable it
sudo apt-get install motion
sudo modprobe bcm2835-v4l2
sudo cp conf/motion /etc/default/motion
sudo cp conf/motion.conf /etc/motion/motion.conf
sudo service motion startMotion Installation Guide for more information
Run the following command to start the frontend aswell as the backend
python3 main.pyOpen your browser and navigate to http://raspberrypi.local:5000 or http://YOUR-PIs-IP-ADRESS:5000
Pull requests are welcome. For major changes, please open an issue first to discuss what you would like to change.
Please make sure to update tests as appropriate.