This is the official implementation of the IROS2025 paper Dense Semantic Bird-Eye-View Map Generation from Sparse LiDAR Point Clouds via Distribution-aware Feature Fusion.
Click the image above to watch the demonstration video.
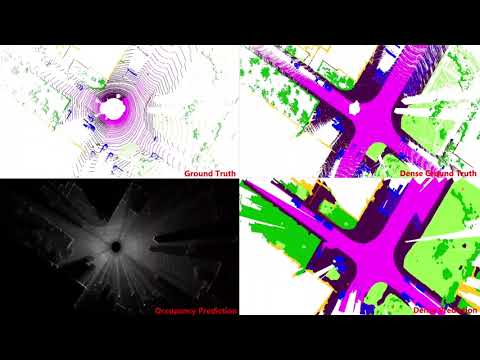
We propose PointDenseBEV, an end-to-end, distribution-aware feature fusion framework. It takes sparse LiDAR point clouds as input and directly generates dense semantic Bird's-Eye-View (BEV) maps. Spatial geometric information and temporal context are embedded as auxiliary semantic cues within the BEV grid representation to improve semantic density.
Extensive experiments on the SemanticKITTI dataset demonstrate that our method achieves competitive performance compared with existing approaches.
Note: This project will continue to be refined in the near future, including environment mirroring, data preprocessing, and weighting results.
- Base Framework: Built on top of OpenPCDet.
- Project Files & Dataset: Download via OneDrive
We strongly recommend using Docker to set up the environment. You can download the Docker environment package (segkitti_250114.tar) from the provided OneDrive link and build the image following the standard Docker guide.
Run the following command to start the container:
docker run --name seg_kitti \
--shm-size=128g \
--gpus all \
-dit \
-p 9800:9800 \
-v /path/to/your/Datasets:/home/Datasets \
-v /path/to/your/Projects:/home/Projects \
c3a505511a3f \
/bin/bash(Replace /path/to/your/... and the image ID c3a505511a3f with your local paths and actual loaded image ID if necessary).
Since this project is built upon OpenPCDet, it needs to be installed before running.
# Clone the repository (if not already done) and enter the project root
cd <PROJECT_ROOT>
# Install the project
python setup.py develop- Download the density maps (
kitti_vis_8) and ground-truth labels (dense_label,sparse_label) from the provided OneDrive link. - Obtain the raw point clouds from the official KITTI website.
After decompression, organize your dataset directory as follows:
<PROJECT_ROOT>
└── datasets/
└── dense_kitti/
├── dense_label/ # Dense-mode ground truth
│ ├── 00/
│ │ └── *.bin
│ ├── ...
│ └── 10/
├── kitti_odo/ # Raw point clouds
│ ├── 00/
│ ├── ...
│ └── 10/
├── kitti_vis_8/ # Visibility map files
│ └── ...
└── sparse_label/
└── ...
Run the training script to train the model.
sh tools/train.shConfiguration Options: You can modify the model and dataset configurations in the following files:
tools/cfgs/kitti_models/densepillar.yamltools/cfgs/dataset_configs/test_pillarnet_128.yaml
Example configuration modifications:
1. Update dataset paths (kitti_dataset.yaml):
DATA_LOAD_PATH: '/home/Projects/DensePillar/datasets/dense_kitti'
DATA_TRAIN_PATH: '/home/Projects/DensePillar/datasets/dense_kitti/train_sample.pkl'
DATA_TEST_PATH: '/home/Projects/DensePillar/datasets/dense_kitti/test_sample.pkl'2. Enable multi-frame point cloud data:
POINT_MERGE_HISFRAME: 03. Adjust voxel numbers (test_pillarnet_128.yaml):
MAX_POINTS_PER_VOXEL: 10
MAX_NUMBER_OF_VOXELS: {
'train': 50000,
'test': 50000
}We provide pre-trained weights for single-frame LiDAR point cloud input.
- Download
checkpoint_epoch_11.pthfrom the OneDrive link. - Place it in the following directory:
logs/model/kitti_models/test_pillarnet_128/pretrain/ckpt/ - Evaluate the trained model (make sure to set the
ckpt_dirpath properly inside the script):
sh tools/test.shVisualization: If you want to visualize the evaluation results, uncomment the visualization code block in
tools/eval_utils/eval_utils.py.
If you find our work helpful, please cite:
@INPROCEEDINGS{li2025dense,
author={Jinsong Li and Kunyu Peng and Yuxiang Sun},
booktitle={2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
title={Dense Semantic Bird-Eye-View Map Generation from Sparse LiDAR Point Clouds via Distribution-aware Feature Fusion},
year={2025},
volume={},
number={},
pages={4123-4129},
doi={10.1109/IROS60139.2025.11246382}}
Special thanks to:
- OpenPCDet for the highly extensible 3D object detection codebase.
- MASS (Multi-Attentional Semantic Segmentation of LiDAR Data for Dense Top-View Understanding) for their inspiring contributions to the community.